- Information
- Produktion
ROBOTER MIT FEINGEFÜHL

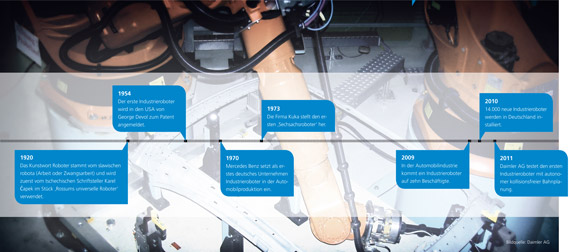
Industrieroboter, die den Menschen das Leben erleichtern, sind schon längst keine Science-Fiction mehr. Sie helfen beispielsweise beim Montieren, Schweißen, Kleben, Stapeln oder Lackieren in Industrieprozessen. Bisher allerdings fast immer hinter Absperrungen oder Schutzgittern, um die Gefahr einer Kollision zwischen Mensch und Roboter und dadurch resultierende Verletzungen zu vermeiden. Am Institut für Anthropomatik und Robotik (IAR) beschäftigt sich die Forschungsgruppe Intelligente Prozessautomation und Robotik (IPR) daher mit dem Einsatz roboterbasierter Produktions- und Assistenztechnik, die sowohl autonom als auch in kollaborativen Anwendungsbereichen eingesetzt werden kann.
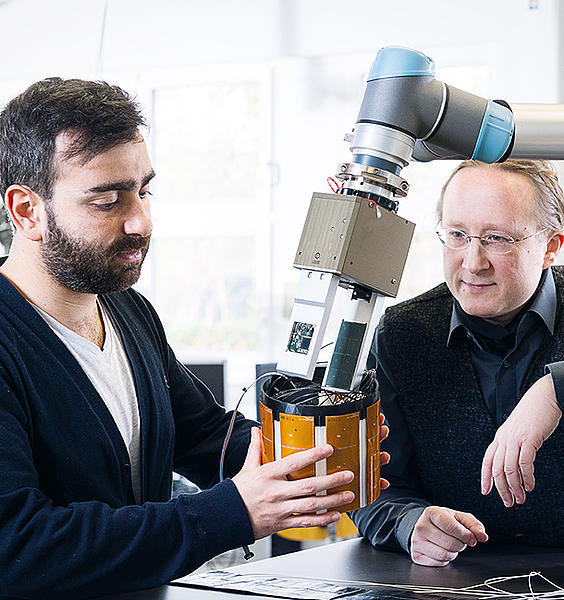
Ein Hauptforschungsthema, das Professor Dr. Björn Hein und Hosam Alagi, im Zuge seiner Promotion, seit mehreren Jahren beschäftigt, sind taktile Näherungssensoren. Diese verbinden zwei Technologien, die bisher nur getrennt voneinander zum Einsatz kommen: Taktile Sensoren, sogenannte taktile Häute, die eine Berührung durch Menschen oder Gegenstände wahrnehmen können sowie Systeme, mit denen sich auf Distanz die Position von Hindernissen im Raum erfassen lässt.
„Was mich antreibt“, so Prof. Hein, „ist die Suche nach dem Mittendrin – also eine Technologie, mit der ein Roboter bereits vor der Berührung, d.h. kurz vor dem direkten Kontakt, die Annäherung erfassen und so rechtzeitig reagieren kann. Hosam Alagi aus meinem Team erforscht und entwickelt daher gerade neue Proximity-Sensoren, mit deren Hilfe ein Roboter rundherum ausgekleidet werden kann.“ Grundgedanke dabei ist es, mehrere Module in einem Näherungssensor zu kombinieren, um sowohl die Umgebung als auch Berührungen simultan erfassen zu können.
Die neue Technologie stellt eine Ergänzung zu bestehenden Systemen dar, die mit Kameras oder Lasersensoren arbeiten. So kann vermieden werden, dass eine Person aufgrund schlechter Lichtverhältnisse oder durch eine Verdeckung durch den Roboter nicht oder nicht rechtzeitig von der Kamera erfasst wird. Dabei machen sich taktile Näherungssensoren das Prinzip der kapazitiven Koppelung zunutze: Rund um den mit Sensormodulen ausgestatteten Greifer des Roboters herum befinden sich Elektroden, die ein elektrisches Feld aufbauen. Sobald sich ein Mensch oder Objekt nähert, verändert sich die Kapazität im elektrischen Feld. Dadurch kann nicht nur erfasst werden, dass es sich um ein Hindernis handelt, sondern auch wie weit es entfernt ist, was wiederum eine situationsabhängige Reaktion des Roboters ermöglicht.
Dies macht auch deutlich, wie stark die Entwicklung von Hard- und Software in der Robotik miteinander verbunden ist: Um nach dem Erfassen eines Hindernisses eine Kollision zu vermeiden, muss der Roboter über entsprechende Software verfügen, die ein optimales Ausweichmanöver berechnet. Aktuell können Annäherungen nur innerhalb von maximal 20 cm Radius erkannt werden. „Ziel ist es, diesen Abstand zu erhöhen, um Industrieroboter auch schneller bewegen und dennoch rechtzeitig zum Stillstand bringen zu können“, erklärt der Ingenieur Alagi.
Sensoren befinden sich bei der am IAR entwickelten Technologie auch im Inneren des Greifers. Das Prinzip ist hier identisch. Unter den außen angebrachten Elektroden, den sogenannten Deckelelektroden, befindet sich eine Schicht aus komprimierbarem Schaum und darunter eine zweite Reihe an Elektroden. Greift der Roboter einen Gegenstand, wird der Druck auch hier durch die Kapazitätsänderung im elektrischen Feld gemessen – ein sanftes Greifen ist möglich und Unfälle werden verhindert.
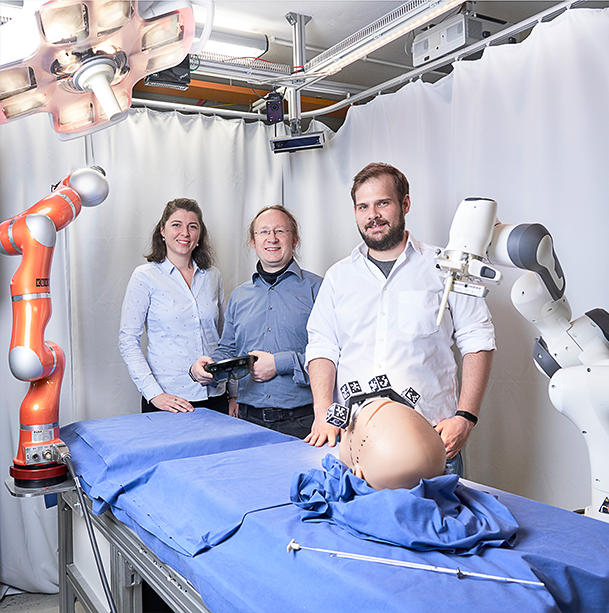
„Sinnvoll ist der Einsatz von kapazitiven taktilen Näherungssensoren besonders dann, wenn es sich um nicht-repetitive Abläufe handelt“, so Alagi. „Wir konzentrieren uns auf Anwendungsszenarien außerhalb von automatisierten Produktionsstraßen. Ein Beispiel wäre die Übergabe eines Gegenstands von einem Menschen an einen Roboter, der nicht immer die gleiche Form hat, sodass sich der Greifer immer neu ausrichten muss.“ Um ein reibungsloses Zusammenspiel von Mensch und Roboter garantieren zu können, muss die Sicherheit gewährleistet sein. Professor Hein betont: „Es ist daher entscheidend, dass unsere Sensoren in naher Zukunft zertifiziert werden, um für den industriellen Einsatz wettbewerbsfähig zu sein.“
„Wir wollen Industrieroboter aus ihren Käfigen befreien und zur einer sichereren Mensch-Roboter-Kollaboration beitragen.“
Bilder: KIT