Christian Kunz, Jun.-Prof. Franziska Mathis-Ullrich and Prof. Bjoern Hein want to make brain surgery safer. In the HoloMed project, they are working on an augmented reality system that offers surgeons context-sensitive support in the future.
Finding your way around a big city without a navigation system – in times of digitalization, that's almost inconceivable. The situation is very different in the everyday work of a surgeon. The only difference is that in the operating room, there are no intersections like in road traffic, but rather fine vessels and nerves that have to be found without orientation aids. "Medical professionals usually have various image files at their disposal, such as magnetic resonance imaging (MRI) or computed tomography (CT) scans. However, this information is usually not in the surgeon's field of vision. We are therefore looking for a way to connect the real world with the digital one and to facilitate the work of physicians," says Jun.-Prof. Franziska Mathis-Ullrich, head of the Chair of Health Robotics and Automation (HERA) at KIT.
"We want to transfer our research to the operating rooms of the world. In doing so, user-centered development and constant exchange with neurosurgeons are important to us. This is the only way to ensure that our system can be seamlessly embedded in existing clinic processes and does not fail due to a lack of acceptance."
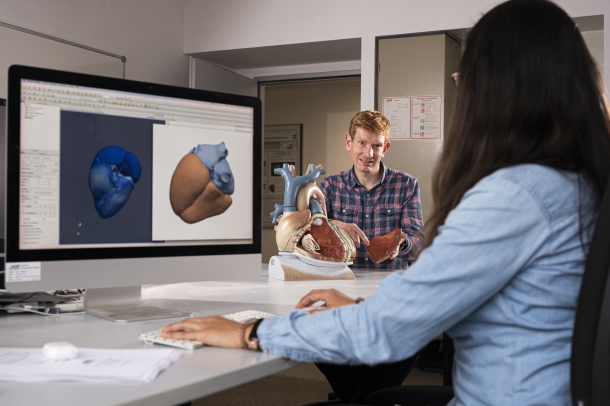
In the HoloMed project, researchers have now developed a system that allows surgeons to virtually display the insertion point on the head, the ventricular system and the angle of insertion on augmented reality glasses so that they can insert the catheter with pinpoint accuracy. The information displayed is based on CT images, which are automatically processed so that the surgeon only sees the structures relevant for the operation.
The initial results prove the team right: In several phantom surgeries on a specially developed neurosurgical phantom skull, the ventricles were optimally targeted. The significantly increased accuracy, a high degree of user-friendliness and the fact that no time-consuming preoperative measures are required are also convincing factors for the neurosurgery physicians.
"What is special about this project is the close integration of science and practice. Due to the cooperation with the Clinic for Neurosurgery, the focus was always on a seamless integrability of the system into the daily clinical routine," explains Bjoern Hein, professor at Karlsruhe University of Applied Sciences and head of the Intelligent Industrial Robots (IIROB) research group at KIT. For example, it was an essential requirement that the process works even when the patient is completely covered. "For the augmented reality system to work correctly, some kind of orientation aid in three-dimensional space is necessary. People often assume they can use the outline of the face as a guide. However, this is not possible in clinics in Germany because patients are covered during surgery. Therefore, we use a marker similar to a QR code, which is placed on the patient's forehead and recognized by the AR glasses, as a landmark."
As soon as the results can be backed up with quantitative evaluations on the phantom, the next logical step would be evaluation in animal experiments to enable translation into real everyday clinical practice. Christian Kunz is optimistic: "We hope that HoloMed will become an initial project that can be adapted to other areas of medicine in the next years – maybe with even greater automation by robots. The primary goal is to provide physicians with an intelligent tool, to increase safety in the operating room and to ultimately increase patients' chances of survival."
The ventricular puncture of the human brain
The ventricular system is a hollow system with a width of one to two centimeters inside the human skull, which is filled with fluid and thus protects the brain from falling. If the pressure in the ventricular system becomes too high – for example, due to cerebral hemorrhage, brain trauma or stroke – this can lead to dangerous consequences. To drain the fluid with a catheter, the ventricular system must be punctured.
Images: Amadeus Bramsiepe / KIT · Intelligente Prozessautomation und Robotik /Lehrstuhl für Health Robotics and Automation / KIT