- Information
- Mobility
- Production
THE JOURNEY IS THE GOAL
Until now, industrial robots have only been able to find their destination if a human programs them the way there with micrometer precision. This is a major effort for companies that use the machines to inspect the quality of countless workpieces, for example. For each inspection point on each workpiece, the robot needs precise instructions in the form of complex programs.
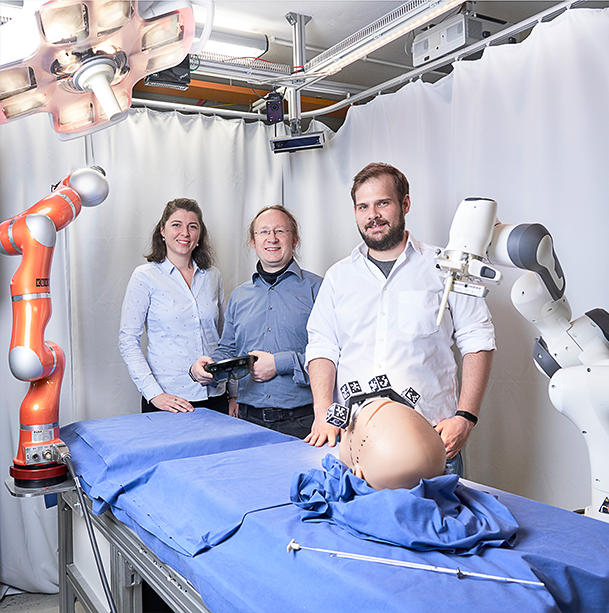
"We can teach robots to find their target independently," KIT Professor Heinz Woern and engineer Bjoern Hein present their system of automatic, collision-free online path planning. The robotics specialists are researching intelligent sensor-based systems. With his support, some former employees of Woern's institute founded the spin-off GFRT in 2006, which is developing the algorithms from KIT into systems for production.
"To secure our prosperity, we have to invent the best products in the world."
One of the first systems from KIT and GFRT, which enables the use of automatic collision-free path generation taking into account all degrees of freedom of the robot during ongoing production operations, was jointly developed with cooperation partner Daimler AG in 2011. Now the system is being tested in Sindelfingen as a parallel plant. "Instead of always programming the robot new paths for the test specimens and test points, these robots calculate their own path independently and reliably," explains Bjoern Hein. Manual programming is almost eliminated and the number of test specimens and combination of test points is unlimited and can be controlled during ongoing operation. From the idea to the implementation, Daimler AG, KIT and GFRT have pulled together. The cooperation has prospects: The current test robot is to become an integral part of the next series of the quality test system.
Further Links
Pictures: KIT