- Information
- Production
ROBOTS WITH SENSITIVITY

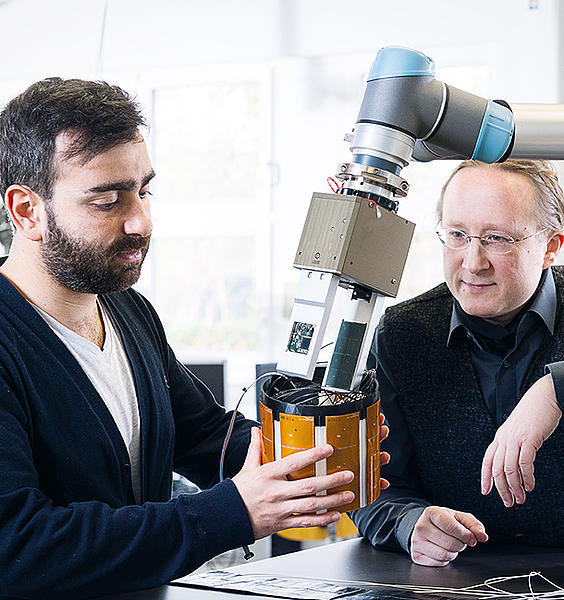
Industrial robots that make people's lives easier are no longer science fiction. For example, they help with assembly, welding, gluing, stacking or painting in industrial processes. Until now, however, they have almost always been placed behind barriers or protective grids to avoid the risk of a collision between humans and robots and the resulting injuries. At the Institute of Anthropomatics and Robotics (IAR), the research group Intelligent Process Automation and Robotics (IPR) is working on the use of robot-based production and assistance technology that can be used both, autonomously and in collaborative application areas.
One main research topic of the doctoral studies of Prof. Bjoern Hein and Hosam Alagi is tactile proximity sensors. They combine two technologies that have so far only been used separately: Tactile sensors, known as tactile skins, which can sense touch from humans or objects and systems that can detect the position of obstacles in space at a distance.
"It is the search for the middle ground – in other words, a technology that allows a robot to sense approach before touch, i.e., to react just in time before direct contact that empowers me to work within this field", says Prof. Hein. "Hosam Alagi, member of my team, is therefore currently researching and developing new proximity sensors that can be used to line a robot all around." The basic idea is to combine several modules in a proximity sensor to be able to detect both, the environment and touch simultaneously.
The new technology complements existing systems that use cameras or laser sensors. This way, we can avoid that a person is not detected or not detected in time by the camera due to poor lighting conditions or due to an occlusion by the robot. Tactile proximity sensors make use of the principle of capacitive coupling: electrodes are located around the robot's gripper, which is equipped with sensor modules. These electrodes build up an electric field. As soon as a person or object approaches, the capacitance in the electric field changes. This makes it possible to detect not only that it is an obstacle, but also how far away it is, which in turn enables the robot to react according to the situation.
This also makes clear how deep the development of hardware and software in robotics is interlinked: In order to avoid a collision after detecting an obstacle, the robot must have corresponding software that calculates an optimal avoidance maneuver. Currently, approaches can only be detected within a maximum radius of 20 cm. "The goal is to increase this distance so that industrial robots can also move faster and still come to a stop in time," explains engineer Alagi.
Sensors are also located inside the gripper in the technology developed at IAR. The principle is identical. Underneath the externally attached electrodes, known as lid electrodes, there is a layer of compressible foam and underneath that a second row of electrodes. When the robot grips an object, the pressure is also measured by the change in capacitance in the electric field – gentle gripping is possible and accidents are prevented.
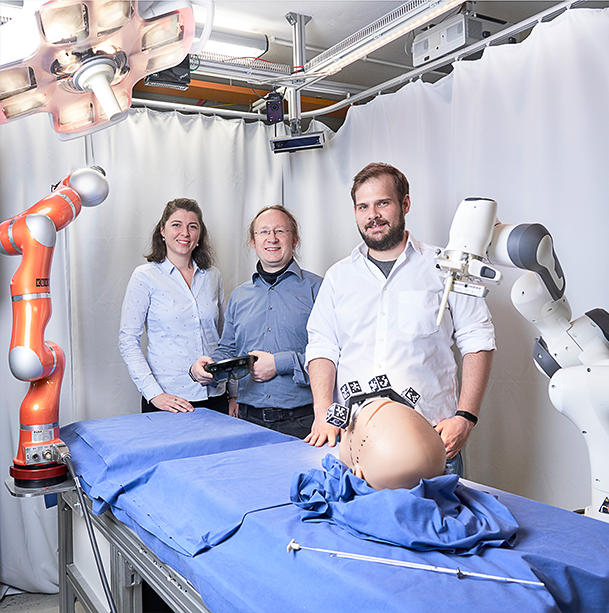
"It makes sense to use capacitive tactile proximity sensors especially when non-repetitive processes are involved," says Alagi. "We focus on application scenarios outside of automated production lines. An example would be the transfer of an object from a human to a robot that doesn't always have the same shape, so the gripper always has to realign itself." To be able to guarantee smooth interaction between humans and robots, safety must be ensured. Prof. Hein emphasizes: "It is therefore crucial that our sensors are certified in the near future in order to be competitive for industrial use."
"We want to free industrial robots from their cages and contribute to safer human-robot collaboration."
Images: KIT